作者:伊芙琳一刀投资笔记

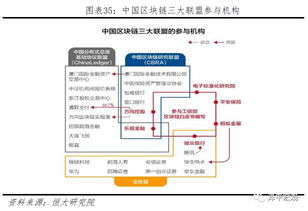
手术机器人产品需要多学科技术集成。手术机器人的关键技术可分为手术规划软件、导航与定位系统、机器人机械结构系统、图像导航系统、机械装置与控制系统、力反馈系统、3D高清手术视觉系统、仿真机械手、机械系统、图像系统、计算机系统、微力感知与控制技术、眼球组织生物力学建模技术和精密运动控制技术。图表1手术机器人关键技术1.软件:手术导航系统的组成和核心技术。手术导航系统通常需要完成四项主要任务:第一,三维模型重建。利用术前的MRI、CT等医学影像数据重建三维模型,得到患者病灶的数字模型,方便医生判断病灶位置,熟悉周围组织结构。三维模型还用于后续的手术规划和术中引导,是手术导航系统的重要数据基础。第二,手术规划和模拟。通过三维模型可以判断病变的位置及其周围组织特征,建立手术路径,制定手术方案,在手术过程中可以用来指导医生或机器人进行操作。此外,医生还可以利用电脑进行模拟操作,以降低出错率。第三,术中校准和指导。手术过程中患者、器官和组织会发生形变和移动,需要及时对三维模型和手术路径进行标定,以保证手术的准确性。同时,需要为医生提供手术区域的三维模型和手术路径的图像,以保证视野,减少探查和引导操作。第四,定位在空之间。通过医学成像、电磁和光学技术,可以测量手术区域组织与手术器械之间的位置和姿态,从而在手术导航系统中精确显示相对位置,可以辅助医生沿着规划好的路径进行手术,还可以对机器人进行伺服闭环控制。手术导航系统通常包括三个核心模块,包括医学成像模块、跟踪定位模块和图像显示模块。医学图像模块理想的医学影像模块能够实时检测病灶和手术器械,并且不损害患者和医生的健康,不妨碍医生进行手术操作。目前还没有一种通用的医学检测方法能够满足上述所有要求。目前,手术导航系统中主要使用的医学图像来自CT、MRI、PET、超声、可见光、荧光等。跟踪模块理想的手术导航系统不需要配备跟踪定位模块,其跟踪定位功能完全可以由医学成像模块来实现。但受限于目前医学影像设备的检测原理和性能,仍有必要引入一套跟踪定位模块,主要包括标记器/传感器和定位器两部分,实现实时跟踪定位手术器械与病灶相对位置的功能。其中,标记/传感器预先固定在患者和手术工具上,可以通过定位器追踪;定位器实时接收传感器/标志器的信号,根据软件算法对处理信息进行处理,并将相关信息传输给图像显示模块。图像显示模块图像显示模块主要实现空之间的配准和图像融合两个功能。空配准是通过软件算法将术前影像、术中影像、手术器械、病灶和跟踪定位系统统一在一个空坐标系中;图像融合是对配准的医学图像和跟踪定位模块的位置信息的综合显示。在图像显示模块的研发中,需要考虑不同适应症的解剖和成像特点,采用合适的显示技术,以达到更加直观清晰的显示效果。以上三个模块从不同方面影响手术导航系统的精度。医学影像模块的精度主要取决于医学影像设备的检测能力,跟踪定位技术的精度主要取决于跟踪定位技术,图像显示模块的精度主要取决于空配准技术和图像融合技术。图像融合技术不同的医学影像设备可以提供不同的信息和不同形式的图像。常用的医学影像有CT、MRI、PET、超声、可见光、荧光等。图像融合技术可以提高图像质量,或者弥补单一模态图像由于成像机理的限制而带来的不足。同时,通过突出感兴趣的组织结构,忽略次级组织结构,可以向医生展示更清晰的手术区域。图像融合技术通常包括图像滤波、图像插值、图像分割和融合重建。其中,图像滤波主要是降低图像噪声,提高信噪比,消除图像伪影;图像插值是对关键数据的各向同性处理;图像分割对不同组织和器官的图像进行划分和分类,其中感兴趣的组织结构被提取出来,次要的组织结构被忽略;重建是对不同模态的图像进行配准和融合,最终以二维或三维重建的形式呈现出来。空之间的注册技术空之间的配准技术对于手术导航至关重要,配准过程是整个手术导航系统中至关重要的一部分。只有完成实际患者空与虚拟三维模型的精确配准后,后续的器械跟踪才有意义,才能保证实际手术器械能够准确到达设定的病灶。配准的意义在于构建实际手术空与虚拟三维模型空之间的映射关系。空之间的映射关系可以包括刚性、仿射、单应、复杂大变形模型等。

空之间的配准技术的算法可以基于灰度或特征。在手术导航系统中,主要使用特征配准,例如解剖标志、表面轮廓、术前植入基准标记等。空之间的配准技术可分为术中配准和自动配准两大类。术中配准依赖于解剖标志、表面轮廓或术前植入参考标记,采用基于特征点配准或表面配准的方法。2海图配准的原则和方法术前数据和术中数据的配准是图像引导手术中的一项关键技术,它将术前数据和术中数据统一在同一坐标系中。受限于硬件的计算能力,空配准算法配准概率高导致配准速度慢,配准速度快导致配准概率低。面对不同的适应症和微创手术特点,往往需要在配准概率和配准速度之间做出权衡。跟踪技术跟踪技术是利用空位置传感器实时检测手术器械和病灶的空位置,依靠算法将它们的空位置放到同一个三维坐标系中。手术导航系统配套的手术器械在制作过程中集成了空之间的位置传感器,而患者病灶上的传感器通常是在手术前安装的。空之间的定位系统按测量方式可分为机械定位、成像定位、电磁定位、光学定位四大类。海图手术导航系统定位技术的比较2.硬件:操作手臂、远心机构和手术器械。从...操作手臂一般需要具备从操作者手中夹紧手术器械和内窥镜,并将其摆动支点定位在手术切口处的功能。微创手术从手术臂配置上可分为分体式和一体式。分体式与操作臂的基座位置无关,一体式从臂固定连接在基座上。分体式从机械手术前体位灵活,易于选择合适的器械插入位置和角度,但在手术室中占用较大空空间,难以确定从机械手之间的相对位置关系。代表产品有ZEUS、Huaque-II、Senhance等。一体式从机械手结构紧凑,占用空间小空,机械手之间的相对位置明确。但是机械臂之间容易干涉,增加了术前定位的难度。代表产品是达芬奇手术机器人。远心机构为了防止手术过程中对人体组织的伤害,手术器械和腹腔镜仅允许在人体内以四个自由度移动:两个绕体表小切口滚动和俯仰的摆动自由度,一个沿器械自身轴线的平移自由度和一个绕器械自身轴线的旋转自由度。根据临床手术经验,四个自由度中,要求体表切口周围的摆动角度为80°,平移自由度的平移范围为300mm,旋转自由度的旋转角度为360°。可以看出,手术器械的可操作空室为球锥空室,锥度为160,深度为300mm。为确保安全,工作空之间的边缘不应相互干扰,理论工作空应大于实际操作空空间。四个自由度的运动轴在体表小切口处相交,使仪器绕固定点即体表切口运动。这种运动称为远心运动,体表切口处的固定点称为远心点,实现这种远心运动的机构称为远心机构。从机器人操作手的功能划分来看,分为位置调节机构和远心定位机构两部分。远心机构广泛应用于微创手术机器人中。遥操作中心机构的刚度、精度、稳定性和灵活性直接决定了微创手术机器人从动系统的性能,因此是从动机械手设计中的核心问题。微创手术中实现远心点约束的远心机构有被动关节、主动控制和机械约束。图4远心机构的分类、优缺点及代表产品
数据来源:付一力,潘博。微创手术机器人技术的研究进展[J],西南证券
外科器械手术器械是微创手术机器人系统的一部分,从手直接作用于患者的部位。它取代了传统微创手术中医生直接操作手术工具时所具备的所有功能,在腹部微创手术机器人的机械系统中尤为重要。一般具有灵活性高、安装方便、无菌处理方便等特点。常包括手术钳、手术剪、高频电刀、吻合器等工具,可分为多关节手术器械和连续体手术器械。多关节手术器械具有较高的灵活性和准确性,使用可靠。本发明可以简化结构,减小直径,增加灵活性。然而,它的低刚度限制了它的应用范围。手术器械的性能主要取决于器械的结构和传动系统,材料的人体相容性也很重要。国内企业对微创手术机器人手术器械的研究起步较晚,在复杂、小尺寸传动方面与国外相关产品存在一定差距。未来,在缩小与国外产品在传动结构紧凑、运动控制精细等方面差距的同时,还有优化手术器械传动链、探索传动机构新原理的途径。未来,手术器械将向体积小、应力大、精度高、灵活性好、可靠性高的方向发展。

图表5连续手术器械图表6多关节手术器械